What I'm trying to say is that we can stuff the droids full of capabilities above a human's. If it's extra thin to crawl in pipes it can still have flippers, and retractable limbs, and the whole package. If it's too heavy it can divide into smaller pieces or it can walk on walls, if it has running feet, it can have a third foot for stability when standing, etc. A small android shaped like a 20-headed hydra could do more, IMO.
Okay, so let's experiment... I want an android that can crawl through a pipe a human can fit in. However, it cannot exceed a human's size. So, where are you going to put those equally strong and long limbs within a human torso, while extending flippers?
If it breaks into pieces, then it needs to have hardware for attachment, that hardware takes up space, needs support and so on. You also need to make connections for all of the wires and plumbing. Connections that seal when they become disconnected... etc., all taking up space, all needing to seal tight (which then limits movement) etc..
In any case, third legs, flippers, increased size, etc. all means that it will lose the ability to do certain other things that a dedicated bipedal human can. Past that,
you are no longer making an android, but a robot.
I guess I have no idea what you are talking about. A shoulder is a ball joint, and it could be replaced with a mechanical ball joint. But an incomplete, self heeling ball joint that isn't mechanical is not necessary to make a human shaped android. So I assume you are no longer talking about a electro-mechanical robot but some sort of biochemical replicant kind of thing, which really isn't implied by the term "android" and is closer to "clone".
Okay, so let's take a shoulder. You also requested:
There's absolutely no reason that a robot with a shoulder that or neck joint that can rotate 360° would perform poorly compared to one with human limitations because of having this extra flexibility, unless you think that an android has to have muscles to turn its head rather than servo motors.
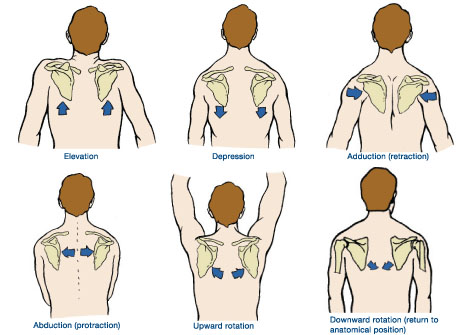
First off, let's consider just a small portion of the combinations of range of motions of a human shoulder (there are more):
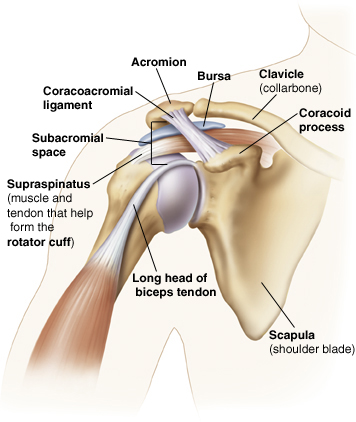
Next let's look at the actual joint, realizing that the bones are not captured (meaning, everything floats and moves like the shoulder blade and clavicle images above):
This is also helpful in understanding that the joints are not captured allowing greater flexibility, replacement joints:
So, with that out of the way, and realizing that there are even more complex motions, you also mentioned the ability to rotate a shoulder 360° (I assume you mean continuously round and round)... Consider this: Our shoulder's cannot spin round and round due to captured muscles, vessels, nerves and even skin... ALL things which your 'android' must have for numerous reasons in some form or another. So we'll try and consider both a mere 360 and back, and continuous rotation.
Using skin as an example; a mere improvement of 360° rotation means that the elasticity of the skin must dramatically improve. Not just how much it stretches, yet also return to its previous length. It will also wear during use (stretching and compressing), meaning unlike a human, it will eventually fail. On a human it self repairs, on an android it won't so there it already falls short.
Considering a continuous rotation scenario (like a robot), you might suggest splitting the skin at that point, however, if you slit the skin you have just broken the "seal." Skin is an amazing seal to our internal components. Disregarding all of the other things it does, it seals all that is inside from all that is outside, and can do so to tremendous pressure. Once you break that seal, it WILL leak, allowing moisture and debris in. Those contaminants will degrade the internal parts. You can accommodate for resistance through materials and shielding, however then you're sacrificing other material strengths/costs simply to compensate for the loss of skin and likely adding bulk.
****
If we look above, a human shoulder and all of its hard components "float." They are not captured joints. That allows for a greater range of motion 'with control' from a minimal number of components. They are held in place using muscle, tendons and ligaments, which also have designed into them flexibility, elasticity, and again the ability to self repair when taken beyond those limits.
Those limits are in place
for a reason. The simplest being, we cannot wind-up our nervous and circulatory systems or they will be pinched off or worse damaged. Whether wiring for sensors (which you must have to mimic touch), or component control (whatever you use for muscles), or plumbing (say for hydraulics), you must either limit the motion or use one of these, a rotary coupling:
The above is a very simple rotary union. All it does is allow (in this case) 2-3 ports of fluid to be transferred through a rotating joint. Say each of the muscles in your arm are hydraulic, and let's say we only need to get 3 lines in to the arm (forward, back, drain), wherein in the arm itself those lines are routed to a manifold for distribution.
Stop there a moment... If all of our controls are in the arm, we also must add 2-solenoids per muscle, and it is likely that we will need a mechanical control to limit extent of motion, naturally sensors must be added to control that motion and confirm positioning... and you can see how even though we are just beginning this is all adding up rather quickly.
Now we also need one of these
integrated into the above, a slip ring:
All a slip ring does is allow electrical signals or current to be sent from a fixed point into one rotating. In our case, if the arm cannot work independently from the body, if all control is done at a central location that likely means thousands of wires, the above is only 12. We can however simply send power meaning three, and once again like the fluid control, via wifi say send signals to an independent controller within the arm.
We have a problem however...
The joints above only turn in a single plane. Our shoulder moves in numerous planes all at once, as though sweeping through any point within a partial sphere, though much more (also in and out, up and down, etc.). So we'll set these inside where the shoulder blade is, and all of that other motion takes place beyond or outside of it.
Blah-blah-blah...
I could go on, however I suspect that you have already ceased reading. Never the less, to simply be able to rotate an arm continuously has added a MASSIVE amount of bulk... More so, weakened it in that the above components are not designed to take a sheer or axial load. They can, however they will wear quickly then fail if used to that end.
Now I'm not just speaking of bulk in the shoulder. Remember, we have moved all of the controls, sensors, and hydraulic controls into the arm. So the arm has become much larger. As it becomes larger filling it with more, then it becomes heavier, so harder to control. So, we then must bulk up those unions to be stronger, add more powerful/larger drives to turn that arm... and so quickly we've just ramped up the size of our android again.
This goes on and on and on... Because, current technology does not allow you to do what you want without increasing in size considerably. I haven't even begun to discuss motions, supporting structures, attachments and so on... All we have done is add a simple connection for 3-electrical lines and 3-fluid.
In other words... for your seemingly 'simple' improvement of rotation, everything changes for the worse very quickly.
That said, if you're curious about robotic automation look here:
https://www.fanucamerica.com/product/robots/ Note the payload and reach compared to size, realizing that you still need to power, control and carry the wiring and plumbing to whatever the end tooling is.
Past that I'm not going to spend anymore time on this debate. If you wish to argue it, then I suggest you ask some experts on a robotics forum that you trust to pose your opinions to. See what they have to say. This is a field of study that is worked at around the world. That being, to simply make a robot that can move as well as a human, let alone exceed those limitations.
You might make one aspect better, yet in the process, you'll make a number of others worse.
K2


![Range-of-Motion[1].jpg](https://www.sghs.org/images/Range-of-Motion[1].jpg)